
")
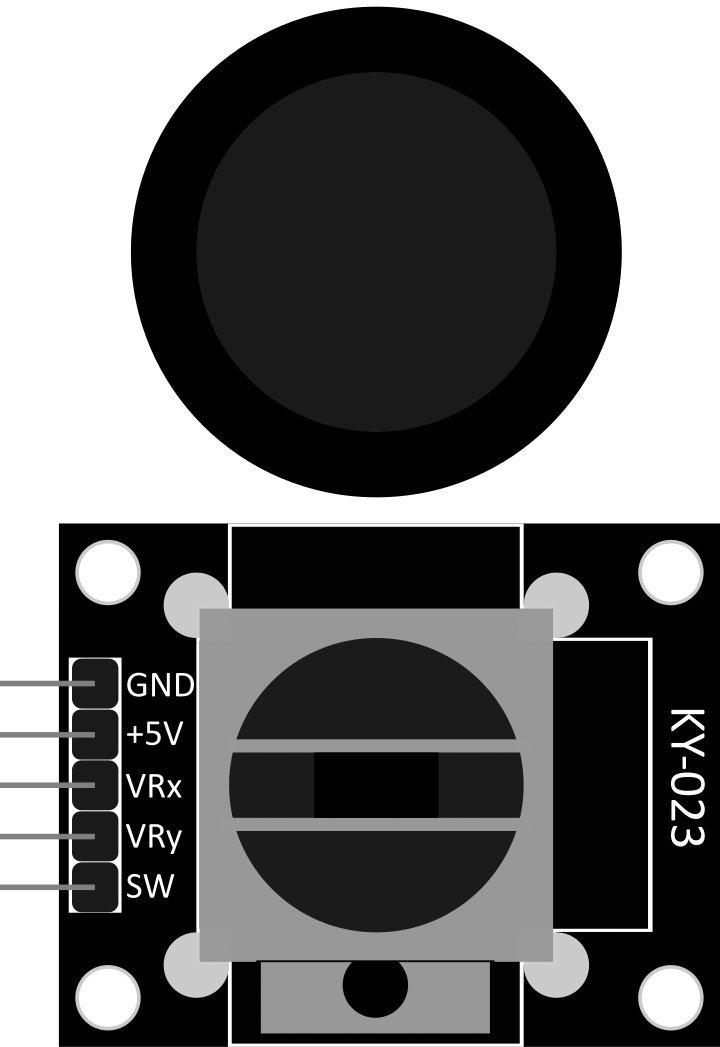
| Code produit: | KY-023 |
La position X et Y du joystick est sortie sous forme de tension analogique sur les broches de sortie.
Dans ce joystick, un potentiomètre séparé a été installé pour l'axe X et pour l'axe Y. On obtient ainsi un diviseur de tension comme celui de l'image suivante.

A l'état de repos, le potentiomètre est au milieu, de sorte que la résistance 1=résistance 2, ce qui signifie que la tension appliquée est répartie de manière égale entre les deux - par exemple, la valeur mesurée à +V=5V -> 2,5V.
Si maintenant la position de l'axe X, par exemple, est modifiée, les résistances respectives changent en fonction de la position actuelle - par exemple, si elle va dans une direction, la résistance 1 devient plus petite et la résistance 2 plus grande, si elle va dans l'autre direction, la résistance 1 devient plus grande et la résistance 2 plus petite.
Selon la façon dont les résistances sont réparties entre elles, il en résulte une valeur de tension respective qui peut être mesurée entre les résistances (dans le cas du potentiomètre, ce que l'on appelle des curseurs) et ainsi déterminer la position de l'axe.

| Arduino | Capteur |
|---|---|
| 5V | +V |
| Masse | GND |
| Pin A1 | VRy |
| Pin A0 | VRx |
| Pin 3 | Bouton |
Le programme lit les valeurs actuelles des broches d'entrée, les convertit en une tension (0-1023 -> 0V-5V) et la sort sur la sortie série.