
Analog Output Accelerometer Module ADXL335
| Code produit: | ADXL335 |
-
$9.95

| Code produit: | ADXL335 |
GY61
Module ADXL345 (sortie analogique de l'accéléromètre triaxial)
Accéléromètre Standard 3 Axes GY61
Puce: ADXL345
Alimentation: 3-5V
Code d'angle de sortie directe à sortie analogique sur trois axes X, Y, Z
fonctionne bien avec arduino.
Taille: 21 X 16mm / 0.83 "x 0.6" (L * W)
Poids Net: 2g
#include <math.h>
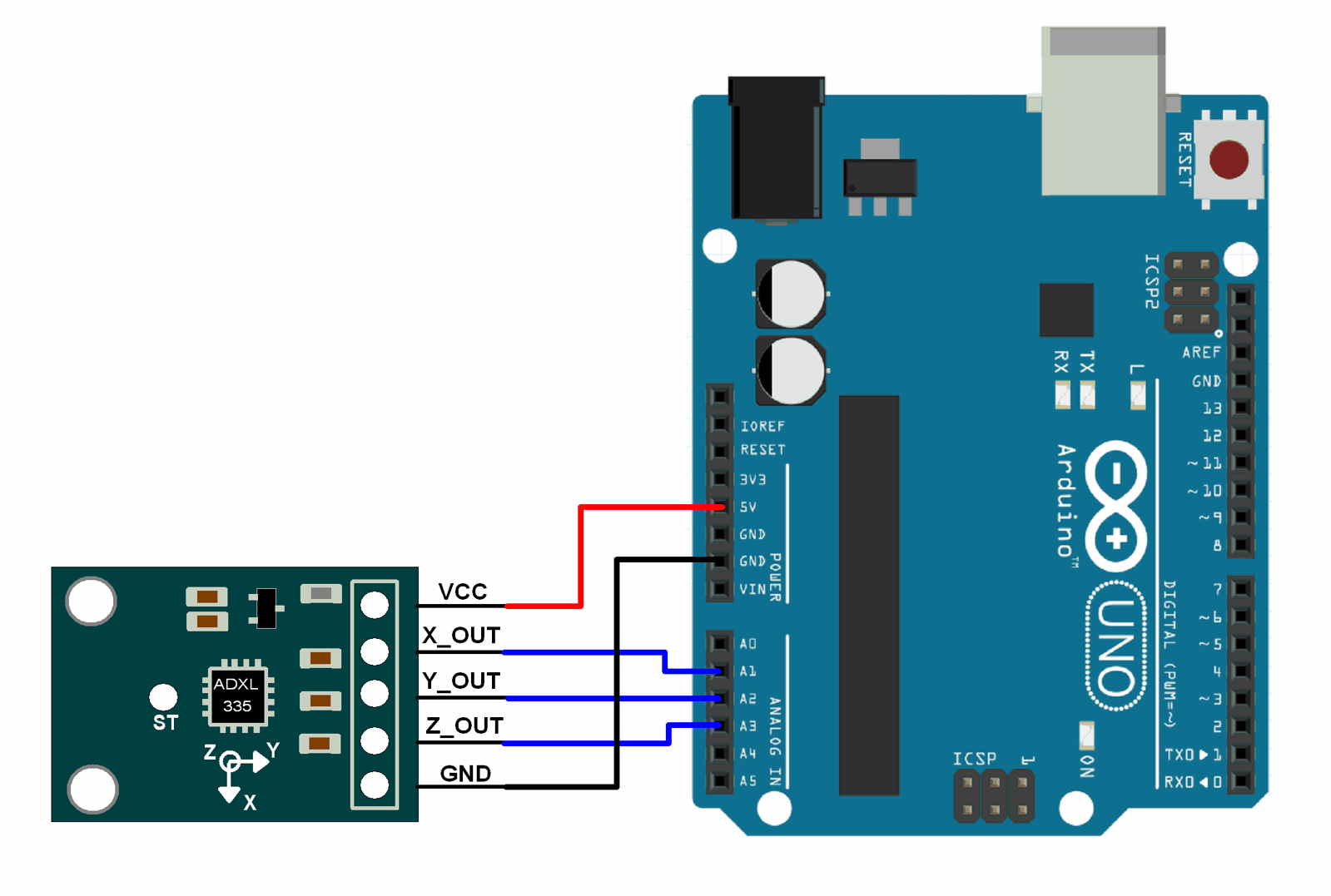
const int x_out = A1; /* connect x_out of module to A1 of UNO board */
const int y_out = A2; /* connect y_out of module to A2 of UNO board */
const int z_out = A3; /* connect z_out of module to A3 of UNO board */
void setup() {
Serial.begin(9600);
}
void loop() {
int x_adc_value, y_adc_value, z_adc_value;
double x_g_value, y_g_value, z_g_value;
double roll, pitch, yaw;
x_adc_value = analogRead(x_out); /* Digital value of voltage on x_out pin */
y_adc_value = analogRead(y_out); /* Digital value of voltage on y_out pin */
z_adc_value = analogRead(z_out); /* Digital value of voltage on z_out pin */
Serial.print("x = ");
Serial.print(x_adc_value);
Serial.print("\t\t");
Serial.print("y = ");
Serial.print(y_adc_value);
Serial.print("\t\t");
Serial.print("z = ");
Serial.print(z_adc_value);
Serial.print("\t\t");
//delay(100);
x_g_value = ( ( ( (double)(x_adc_value * 5)/1024) - 1.65 ) / 0.330 ); /* Acceleration in x-direction in g units */
y_g_value = ( ( ( (double)(y_adc_value * 5)/1024) - 1.65 ) / 0.330 ); /* Acceleration in y-direction in g units */
z_g_value = ( ( ( (double)(z_adc_value * 5)/1024) - 1.80 ) / 0.330 ); /* Acceleration in z-direction in g units */
roll = ( ( (atan2(y_g_value,z_g_value) * 180) / 3.14 ) + 180 ); /* Formula for roll */
pitch = ( ( (atan2(z_g_value,x_g_value) * 180) / 3.14 ) + 180 ); /* Formula for pitch */
//yaw = ( ( (atan2(x_g_value,y_g_value) * 180) / 3.14 ) + 180 ); /* Formula for yaw */
/* Not possible to measure yaw using accelerometer. Gyroscope must be used if yaw is also required */
Serial.print("Roll = ");
Serial.print(roll);
Serial.print("\t");
Serial.print("Pitch = ");
Serial.print(pitch);
Serial.print("\n\n");
delay(1000);
}